Main menu
You are here
Servo motors
[last updated: 2020-07-30]
(go to:) Servo motor Specs
-----
- generic info from Arduino.cc:
- The signal pin can be yellow, orange or white and should be connected to a digital pin on the Arduino board.
- The ground wire can be black or brown and should be connected to a ground pin on the Arduino board.
- The power wire is typically red:
- Servo power can be connected to the 5V pin on the Arduino board, however some servos draw more current than the Arduino 5v pin can provide, in which case you should use a separate supply.
- Check specs for your specific servo. You often can supply them with 12v or more to get higher speed & torque.
- If you use a separate supply, be sure to connect the ground of the Arduino and the ground of the external power supply together.
- Controlling servo motors:
- Servo motors are controlled with pulses.
- There is some confusion/disagreement over what to call the actual control protocol. This is complicated by the fact that many servos are used in RC models, so control is received via RF signals, which have their own protocols.
- Some references call servo motor control PPM (pulse position modulation), while others call it PWM (pulse width modulation).
- Generally, however, the pulses that control the servo motors are roughly 1 - 2ms long, repeated every 20ms.
The parameters for the pulses are: the minimum pulse width, the maximum pulse width, and the repetition rate. - Servo position (or speed in the case of continuous rotation servos) does not depend on the pulse duty cycle (which would be strict PWM), but only on the width of the controlling pulses.
- [from WikiPedia: Servo Control] In many RC servos a 1.5 ms pulse will make the motor turn to the 90° position (neutral position). The low time (and the total period) can vary over a wide range, and vary from one pulse to the next, without any effect on the position of the servo motor.
- For servos that are NOT continuous rotation,
the width of the pulse determines the angular position to which the servo will turn. - For servos that ARE continuous rotation, the pulse width determines the speed of rotation.
-------------------------------------
- Servo motors are controlled with pulses.
- Operation:
- program:
servoTest01.ino - schematic:
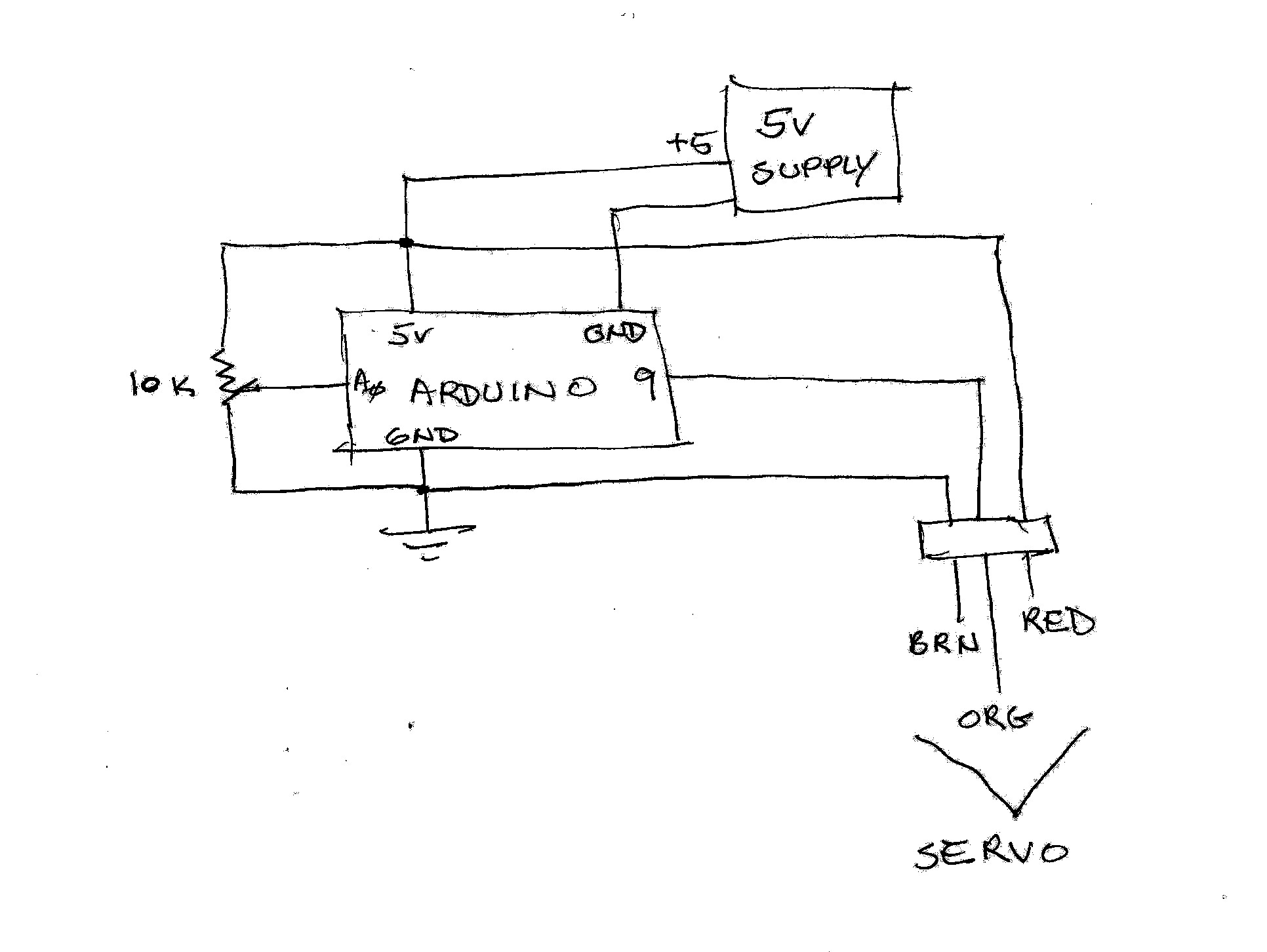
- program:
Servo motors have three wires: power, ground, and signal.
.
.
.
eof
Powered by Drupal